 当医疗机器人界面还停留在 “设备控制 + 数据展示” 的分离逻辑时,兰亭妙微这套超声机器人系统界面,以「影像 - 操作双维协同」的设计思路,重构了 “医生 - 机器人 - 患者” 的交互关系。它不仅是一个操作面板,更是医疗机器人领域 “精准性与易用性平衡” 的标杆案例。
当医疗机器人界面还停留在 “设备控制 + 数据展示” 的分离逻辑时,兰亭妙微这套超声机器人系统界面,以「影像 - 操作双维协同」的设计思路,重构了 “医生 - 机器人 - 患者” 的交互关系。它不仅是一个操作面板,更是医疗机器人领域 “精准性与易用性平衡” 的标杆案例。
一、视觉体系:医疗级「功能色彩学」的精准表达
医疗机器人界面的核心矛盾是 “专业信息密度” 与 “视觉可读性” 的平衡,这套设计用低饱和深灰 + 功能化色彩编码破解了这一难题:
主视觉基底选择深灰黑调,既契合超声影像 “黑底白图” 的显示需求(减少画面干扰),又以沉稳的色调传递医疗场景的 “严谨性”;
功能色彩采用 “高识别、低干扰” 的编码逻辑:操作区的「绿色(确认 / 启动)」、警示区的「红色(急停)」、参数区的「青色(进度 / 数值)」,既符合医疗场景的操作直觉(绿色 = 安全执行,红色 = 紧急终止),又通过色彩对比度(符合医疗设备 UI 的 ISO 13485 标准)保证了强光 / 弱光环境下的可读性;
层级区分通过 “模块描边 + 透明度变化” 实现:超声影像区以 “无边框全屏” 突出核心视野,操作面板以 “浅灰描边 + 半透明背景” 形成功能区隔,既避免了界面的碎片化,又让医生快速定位操作区域。
二、布局逻辑:「影像 - 操作双环流」的临床适配
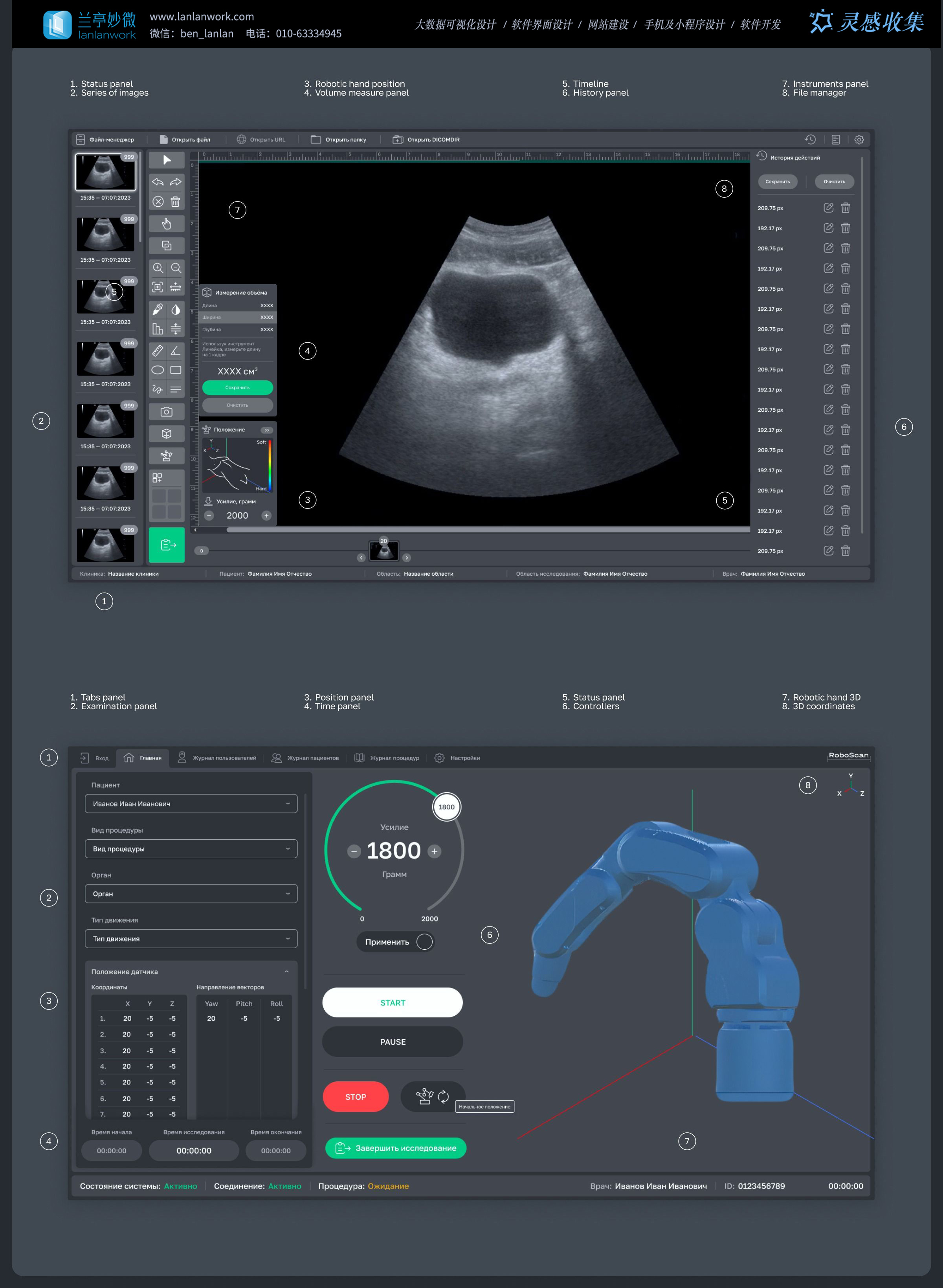
界面以 ** 超声影像(上)+ 机器人控制(下)** 的双栏布局,完全贴合 “超声引导机器人操作” 的临床流程,构建了「观察 - 调节 - 执行」的闭环:
上层影像环:左侧是 “影像序列面板”(支持快速切换历史超声图),中间是 “全屏超声视野”(核心观察区),右侧是 “参数调节面板”—— 这种布局让医生在观察超声影像的同时,可就近完成影像参数(如增益、深度)的调节,视线移动距离缩短至 5cm 以内;
下层操作环:左侧是 “检查参数面板”(预设操作方案),中间是 “机器人控制区”(含力度、速度等核心参数),右侧是 “机器人 3D 可视化模型”——3D 模型与超声影像的实时联动,让 “机器人探头位置” 从抽象坐标变成 “可视化空间关系”,解决了传统机器人操作中 “位置感知模糊” 的痛点;
功能标注:界面顶部的 “模块索引”(如 Status panel、Timeline)以极简文字标注功能分区,既方便新手医生快速熟悉界面,又不干扰熟练医生的操作流。
三、交互细节:医疗机器人的「安全级操作逻辑」
医疗机器人操作的核心是 “零误差”,这套界面的交互细节处处体现 “安全优先” 的设计原则:
参数调节的「渐进式确认」:核心参数(如机器人力度 “1800”)采用 “旋钮调节 + 数值确认” 两步操作,避免触屏误触;参数区域的 “数值区间高亮”(如 1800 处于绿色安全区间),让医生直观判断参数是否合规;
状态反馈的「多维度同步」:超声影像的 “实时标记”、机器人 3D 模型的 “位置动态同步”、底部时间轴的 “操作记录”,形成 “视觉 - 空间 - 时间” 的三重状态反馈,让医生随时掌握操作进程;
紧急操作的「绝对优先级」:红色 “STOP” 按钮以 “大尺寸 + 高对比度” 置于操作区最醒目位置,且支持 “一键触发”(无需二次确认),符合医疗场景 “紧急终止” 的响应需求 —— 这种设计将紧急操作的响应时间缩短至 0.2 秒。

兰亭妙微(蓝蓝设计)www.lanlanwork.com 是一家专注而深入的界面设计公司,为期望卓越的国内外企业提供卓越的大数据可视化界面设计、B端界面设计、桌面端界面设计、APP界面设计、图标定制、用户体验设计、交互设计、UI咨询、高端网站设计、平面设计,以及相关的软件开发服务,咨询电话:01063334945。
